Take Our Content to Go
This case study explores how the Contingency Planning Toolkit for Advanced Air Mobility (CPT AAMO) equips NASA and industry with innovative software and AI solutions to enhance safety, resilience, and scalability in future cooperative airspace operations.
Introduction
As airspace becomes increasingly shared by traditional aircraft and new entrants such as Urban Air Mobility (UAM) and uncrewed aircraft systems (UAS), the need for robust contingency planning grows. Envisioned cooperative airspace management paradigms rely heavily on automation and real-time data exchange. However, contingency scenarios, such as lost communication links or sudden airspace restrictions, require thoughtful coordination between human and automated actors to ensure safety, efficiency, and resilience.
To address these challenges, Mosaic ATM, in collaboration with The Ohio State University and CAL Analytics, developed the Contingency Planning Toolkit for Advanced Air Mobility (CPT AAMO). This toolkit is designed to support coordinated replanning and contingency management in complex, multi-agent environments, enabling the next generation of airspace operations.
In Phase I, we demonstrated the feasibility of using quantitative work modeling to evaluate contingency procedures. Through analysis and discussion with NASA, we selected one use case – adapting operations to accommodate an uncrewed aircraft that loses its command and control (C2) link – to simulate in Phase I. The scenario involved sensemaking actions and contingency response actions allocated across multiple roles in the cooperative traffic management ecosystem.
Our simulation experiment matrix of potential distributed work architectures focused on documented procedures and requirements for responding to a lost C2 link. The simulation produced metrics including closest point of approach between two simulated aircraft, number and nature of concurrent tasks conducted by each actor, time the aircraft spent operating without a functioning C2 link, and flight delays associated with the contingency response procedure. The simulation also allowed us to explore the nature and frequency of information exchanges between actors.
Based on our simulation results, we proposed multiple elements of the CPT AAMO Toolkit, including procedures for contingency planning and management, software services that can be deployed to the cooperative traffic management network, processes for evaluating proposed procedures to support certification, user interaction concepts for automation design, and schema extensions where needed to support cooperative traffic management data exchanges.
Our Phase I foundation set us up to pursue three key thrusts in Phase II:
- Expand on our computational modeling of replanning and contingency procedures to help NASA and industry define appropriate procedures, with a particular focus on understanding the human taskload and the appropriate role of automation in supporting safety, efficiency, and resilience.
- Systematically evaluate proposed procedures to derive functional, information, and performance requirements, encapsulate automation requirements in software services deployed to the cooperative traffic management network, and demonstrate the services in a realistic operating environment.
- Document best practices and means of evaluating evidence gathered by cooperative traffic management service providers to demonstrate means of compliance with FAA authorization requirements to operate in the airspace.
Effective contingency planning and management are critical to maintaining safety and resilience in the cooperative traffic management environment. The results of our Phase II research will inform work being conducted by NASA, FAA, and industry to facilitate the transition from the current aviation operational environment to the envisioned future of cooperative operations.
Problem
Emerging traffic management concepts like UTM and AAM envision automation-driven coordination, assuming that predefined procedures and services can handle operational disruptions. However, real-world experience in air traffic management shows that contingency planning often requires dynamic sensemaking and human intervention.
Key challenges include:
- Lack of clarity around responsibility allocation during contingencies.
- Insufficient tools to evaluate distributed work architectures for safety, efficiency, and resilience.
- Underspecified procedures for handling disruptions such as lost command and control (C2) links or vertiport reconfigurations.
- Absence of tools for compliance verification and dynamic replanning under changing regulatory or operational conditions.
Without structured contingency planning tools, the transition to cooperative, highly automated operations risks inefficiencies, increased task load, and safety breakdowns.
Solution
In our Phase II effort, we developed two products that we are actively marketing to the industry. These products operationalize the requirements derived from our research results. Both the products and the research results are summarized in this section.
Mosaic ATM and its partners developed a two-pronged solution under SBIR Phase II:
1. Contingency Management Service (CMS)
A software service designed to integrate with UTM architecture, the CMS:
- Dynamically replans UTM operations in real time.
- Considers aircraft location, terrain, obstacles, and separation minima.
- Interfaces with other systems using ASTM USS Interoperability standards.
- Was integrated with CAL Analytics’ Contingency Management Platform for live demonstrations.
2. EASEL-AI (Enterprise Architect for Systems Engineering Leveraging AI)
Figure 1 shows a screenshot of EASEL-AI with a summary of its analysis of a BVLOS waiver application. It is an advanced AI framework built on LLMs and retrieval-augmented generation (RAG) to:
- Ingest unstructured regulatory data and generate semantically structured knowledge.
- Support automated document analysis for waiver applications (Part 107 and Part 135).
- Enable intelligent search, compliance verification, and proactive regulatory updates.
- Provide a no-code interface accessible to users beyond AI/ML experts.
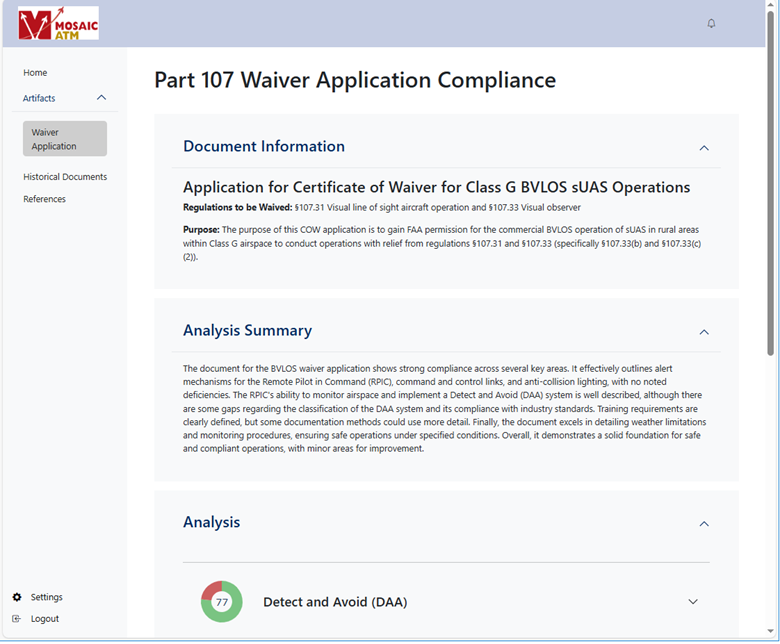
Figure 1. Screenshot of EASEL-AI Showing Analysis of a Waiver Application
EASEL-AI analyzes multiple separate topics within the document, such as the applicant’s description of its detect and avoid (DAA) capability as shown in Figure 1 and for Alerts and Failures in Figure 2. EASEL-AI also provides links to the relevant documents and a breakdown of its analysis for each topic. The analysis is based on a set of questions relating to each topic and the model’s assessment of whether the document addresses each question.
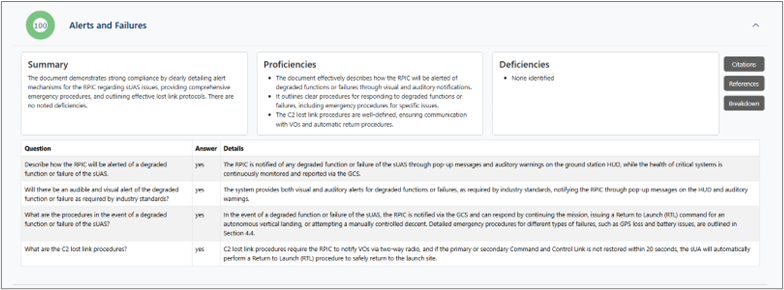
Figure 2. Screenshot of EASEL-AI Showing an Analysis Breakdown for One Topic
Based on additional feedback from industry, we pivoted to leverage the EASEL-AI framework to support Part 135 drone operators in managing their regulatory documentation. The system not only identifies whether and where regulatory requirements are met but also supports proactive detection of necessary documentation updates following regulatory changes. It is equipped with a user-friendly interface to make these capabilities accessible beyond AI experts and is evolving to support other domains such as Model-Based Systems Engineering (MBSE). We aim to continue developing and commercializing EASEL-AI.
Together, CMS and EASEL-AI form the CPT AAMO Toolkit, a platform that combines operational decision support with regulatory intelligence.
Achievements
The CPT AAMO project achieved several key milestones:
- Developed and validated CMS software integrated into UTM ecosystem demonstrations.
- Operationalized EASEL-AI to support both waiver applications and certified drone operator documentation.
- Simulated multiple contingency scenarios, including:
- Lost C2 link during UAM operations.
- Aerodrome (vertiport) reconfiguration due to changing wind conditions.
- Analyzed distributed vs centralized work architectures, quantifying tradeoffs in efficiency, workload distribution, and coordination complexity.
- Identified critical architecture gaps in current standards, especially around real-time operational intent sharing and actor responsibilities.
- Refined models using MBSE and agent-based simulation to decompose complex procedures into actionable functions and system services.
Validation and Insights / Results
Simulation and modeling under the Work Models that Compute (WMC) framework provided deep insights:
- Centralized architectures perform better in terms of efficiency but overload certain agents.
- Decentralized architectures promote workload equity but introduce negotiation overhead and coordination risks, e.g., nearly double the OI updates required in high-density airspace.
- Synchronized situational awareness is essential. Even small lags in information sharing can cause automation missteps or delays.
- Responsibility ambiguity, such as unclear ownership of aircraft sequencing, can cause replanning mismatches and operational inefficiencies.
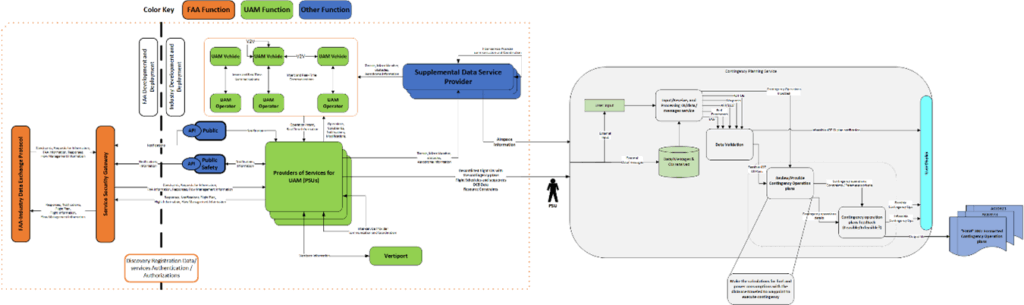
Figure 3. High-Level Contingency Planning Service Architecture
Real-World Scenario Analysis
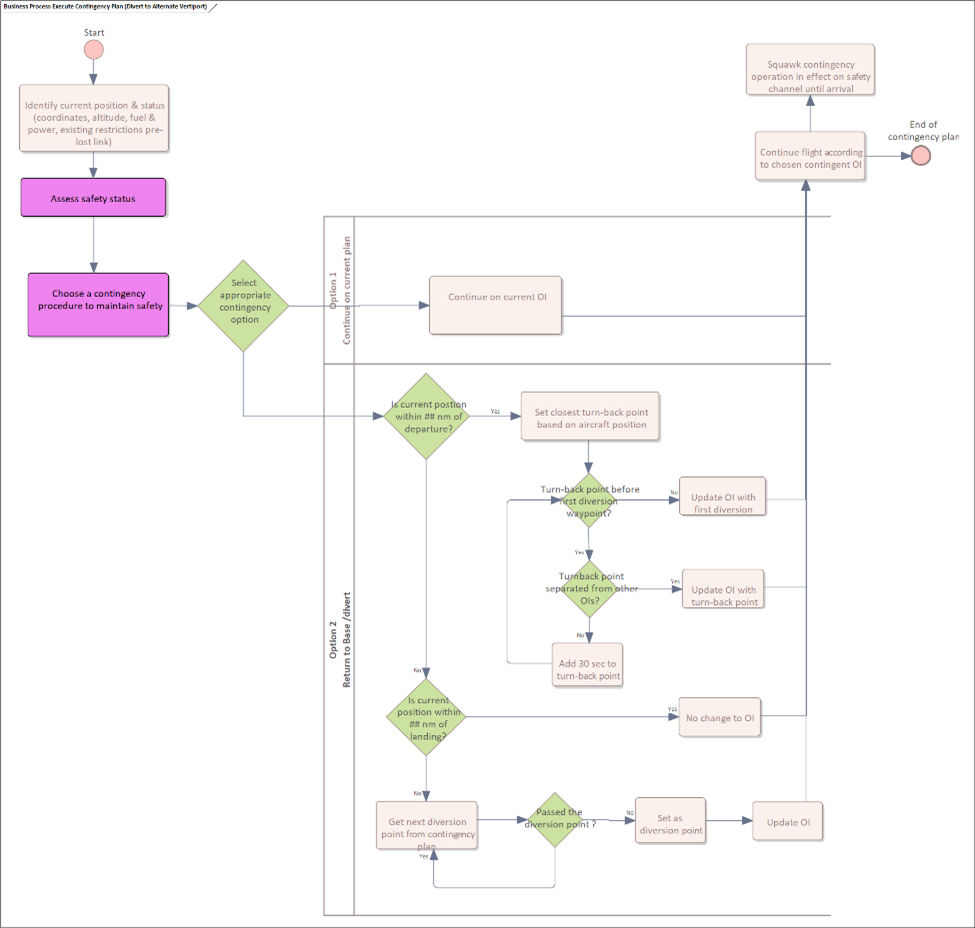
Figure 4. Simulation Implementation of Contingent Aircraft Response to Lost C2 Link
- For Lost C2 Link, simulations showed that contingent aircraft must update their OIs and ideally publish contingency trajectories.
- Impacted flights require speed adjustments or go-arounds based on vertiport availability and aircraft proximity.
- Holding patterns and dynamic OI negotiation become critical, especially in constrained corridors.

Figure 5. Use Case Diagram Showing Actors, Actions & System Services Involved in Negotiating New OIs
Impact
The CPT AAMO Toolkit fills an essential gap in concept validation, safety assurance, and procedural maturity for the future airspace ecosystem. The toolkit’s ability to simulate, evaluate, and refine distributed work procedures is already guiding NASA, FAA, and industry standards development.
Conclusion
The CPT AAMO Phase II effort successfully delivered two deployable software solutions, validated new distributed work architectures, and provided critical insights for advancing cooperative traffic management. Looking forward, continued development and industry engagement are essential to achieving a safe and scalable future for UAM and other advanced aviation operations. Recommended next steps include:
- Refine distributed architectures by aligning data exchange standards and improving decision-making synchronization.
- Expand scenario complexity, addressing multiple simultaneous disruptions.
- Define performance and certification requirements for cooperative operating practices (COPs).
- Conduct cross-domain comparative analysis, identifying shared and unique requirements across UTM, UAM, and high-altitude operations.
Through these next steps, the CPT AAMO approach will continue supporting NASA, FAA, and industry in transitioning from vision to a safe, certified, and scalable reality for cooperative airspace operations.


